Jiahe Xu (Jay)
I am the CTO of Pinocchio AI. Our mission is to create realistic robots that interact with people through lifelike, animal-inspired behaviors, seamlessly integrating into daily life to provide meaningful assistance.
My research focuses on Object-Centric Manipulation, Bimanual Manipulation, Learning from Human Video, and 3D Robot Learning.
Previously, I was a System Engineer(Sensor, System & Software) at CMU. My work includes sensor calibration(Pinhole, Fisheye, Stereo, Thermal cameras, IMU, and Lidar), teleoperation(real2sim, real2real), real-time system (ROS1 and ROS2), 3D Scene reconstruction. Embeded Computer Platforms I worked with: Jetson Orin/Xavier, NUC, iOS(Iphone & VisionPro) Robot Platforms I worked with: Boston Dynamic Spot, Custom RC Car, Custom Quadrotors, Franka Panda, Mobile Aloha, UR5. Simulation Enviroments I used: PyBullet, Sapien, IsaacGym/IsaacLab, Mujoco, and Genesis
I plan to build intelligent systems that can be applied to any robot with a handful of demonstrations.
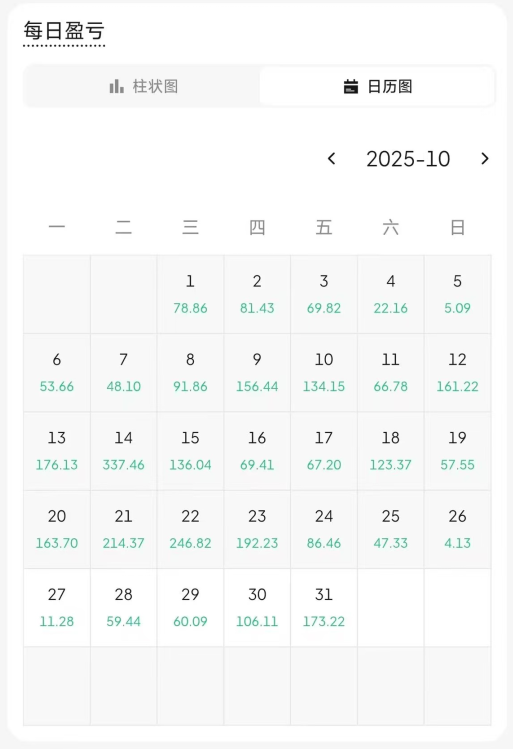
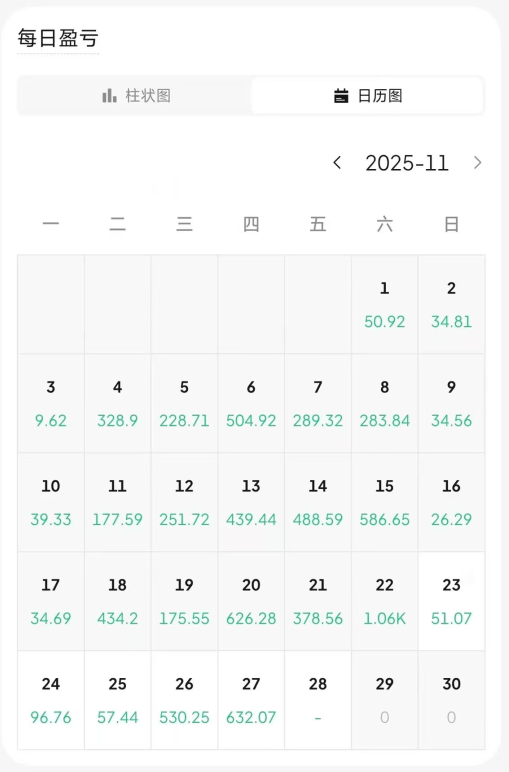
Recently, I have been doing Quant Trading and I have posted my records at the bottom of the page. Please contact me if you want to join the Quant Team.
Email: xjh4438318846@gmail.com
Google Scholar
LinkedIn
CV (Updated 05/21/2025)
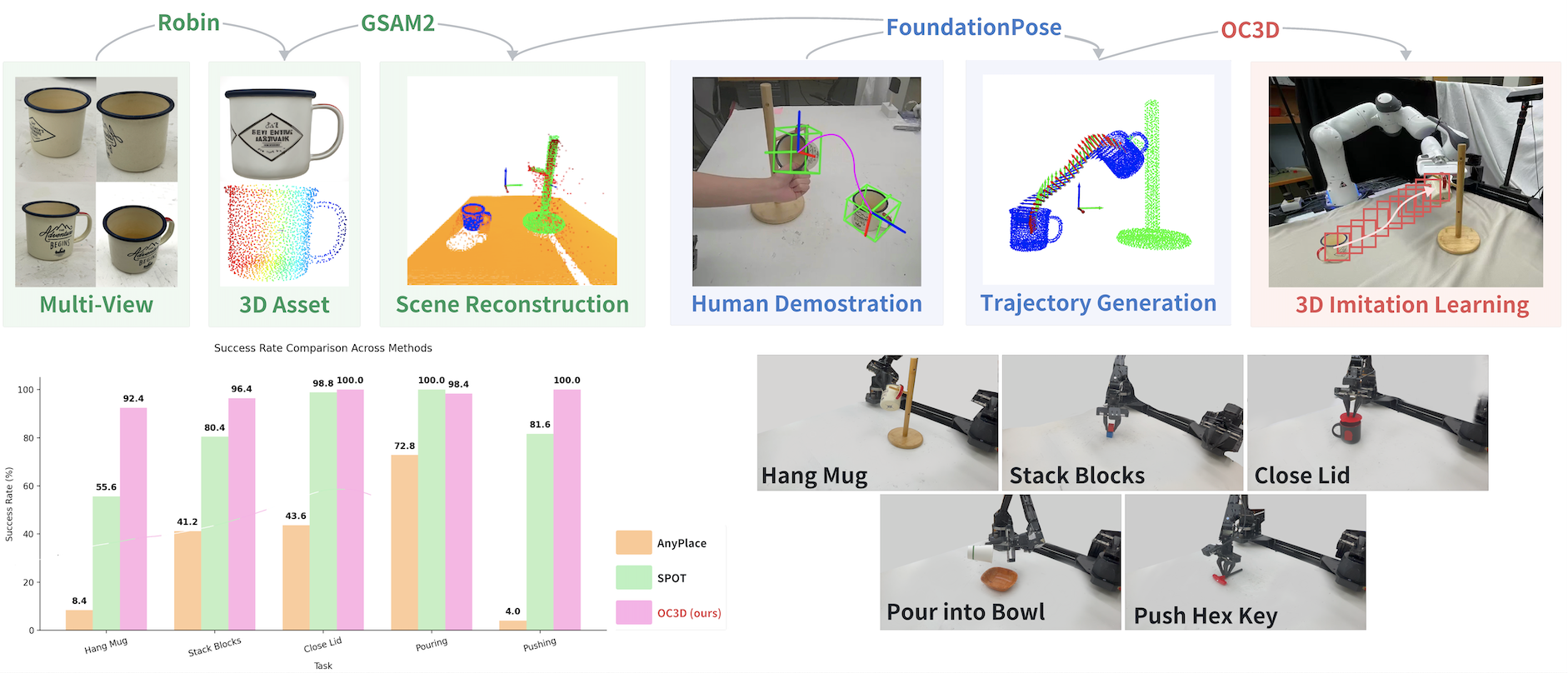
OC3D: Object-Centric 3D Diffusion Planner
Jiahe Xu*, Hellen Wang, Gang Tan
In Submission
Paper(coming soon)
|
Webpage

Quant Trading Robot Results
Recently, I am doing Quant-Trading bot in crypto market and here are the results: